摄像机模型及实现
目录
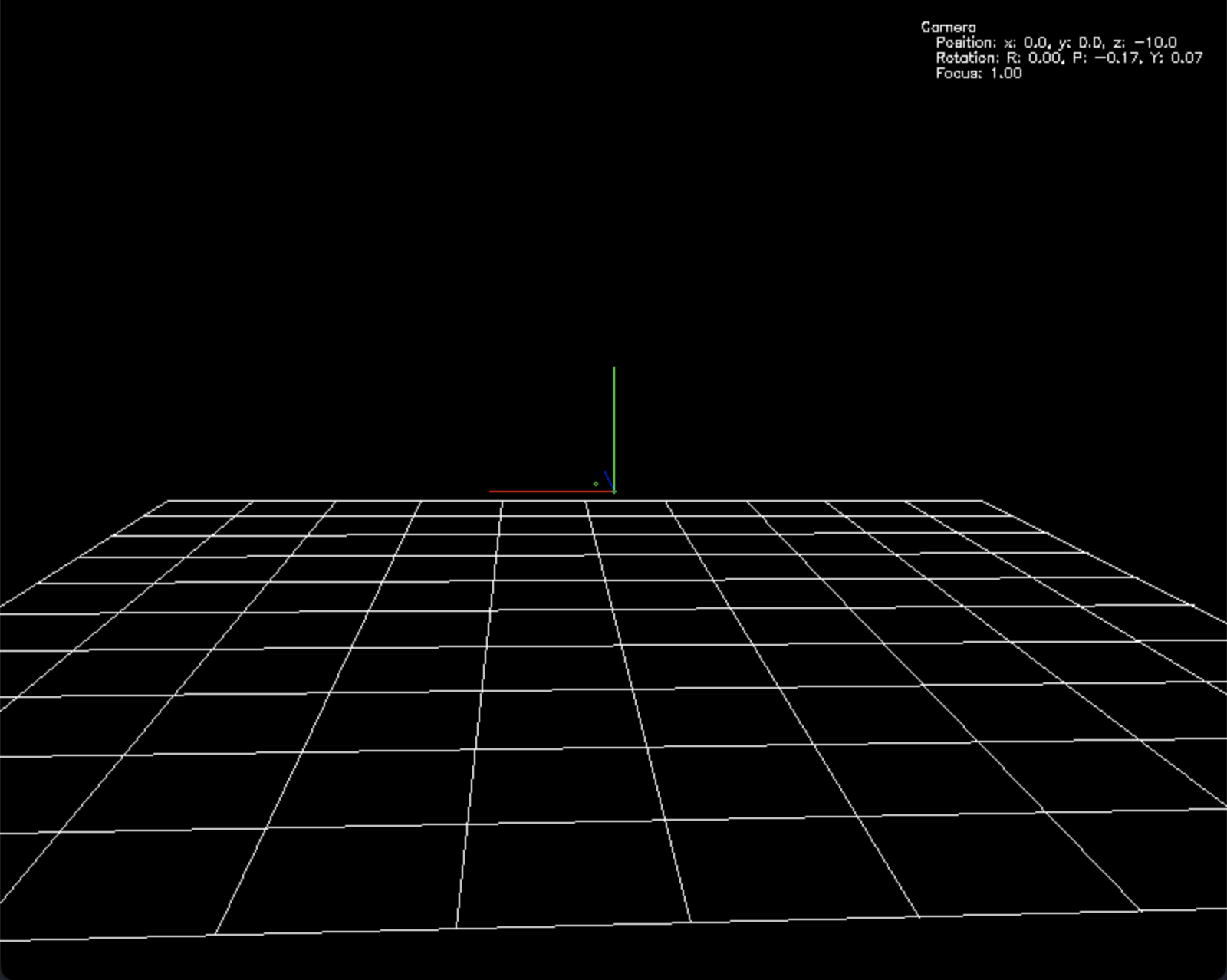
3D 设计软件和游戏中的图像经常是以一个观测者的角度展示的,可以把这个过程想象成一个人拿着一台摄像机在拍摄,在机器视觉中叫摄像机模型。
研究过程中基于 OpenCV 做了一个简单实现,项目代码可以在这里下载到 “github 代码下载”,欢迎大家下载交流。
摄像机模型的数学模型
座标系
理解摄像机模型需要建立对应的座标系,在这个模型里面涉及到了下面 3 个座标系:
世界座标系 (World frame)
被观测目标存在于世界座标系中,使用世界座标系座标表示位置,是个 3 维座标系,可以使用常用的单位,比如‘米’。
相机座标系 (Camera frame)
通常使用摄像机的光学中心为原点,是一个 3 维座标系,表示从相机的光学中心原点来衡量各个目标的位置,尺度可以保持和世界座标系统一,比如都使用‘米’;相机可以移动到世界座标系中的任意位置和任意角度(姿态)。
像平面座标系 (Image plane frame)
这是最终观测的图像座标系,是一个 3 维座标系,在相机中是 CCD 的座标系,例如以左上角为原点,尺度为‘像素’。
座标转换
当移动摄像机时,摄像机成像的结果可以通过座标转换来完成:
- 把世界座标系中的物体座标进行’座标系变换’,转换成相机座标系中的座标
- 通过相机内参转换到像平面座标系
座标系变换过程
世界座标 $O_w$ 用下面形式表示:
$$
\left(
\begin{matrix}
X_w
Y_w
Z_w
\end{matrix}
\right)
$$
摄像机在世界座标系中被移动到 $t$ 位置:
$$
\left(
\begin{matrix}
x_t
y_t
z_t
\end{matrix}
\right)
$$
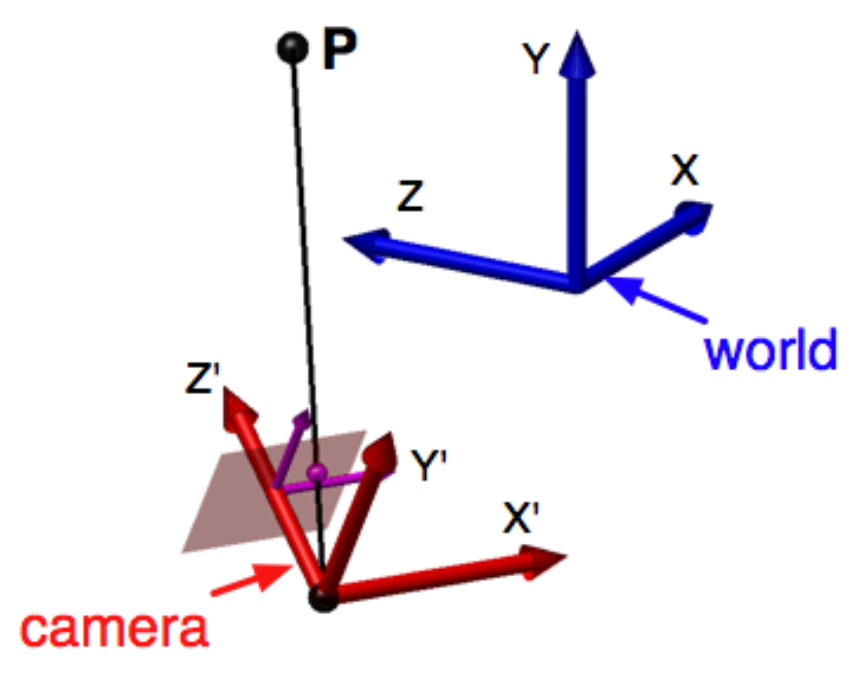
第一步:先抵消掉摄像机的空间移动 $t$,也就是 $O_w - t$。这一步后新的座标系与摄像机座标系原点重叠。
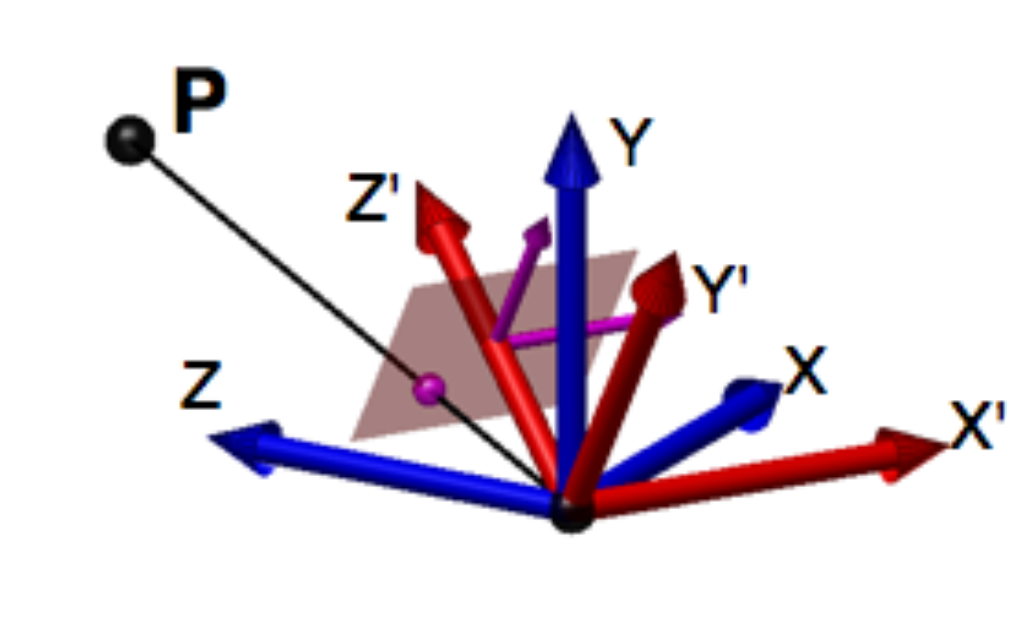
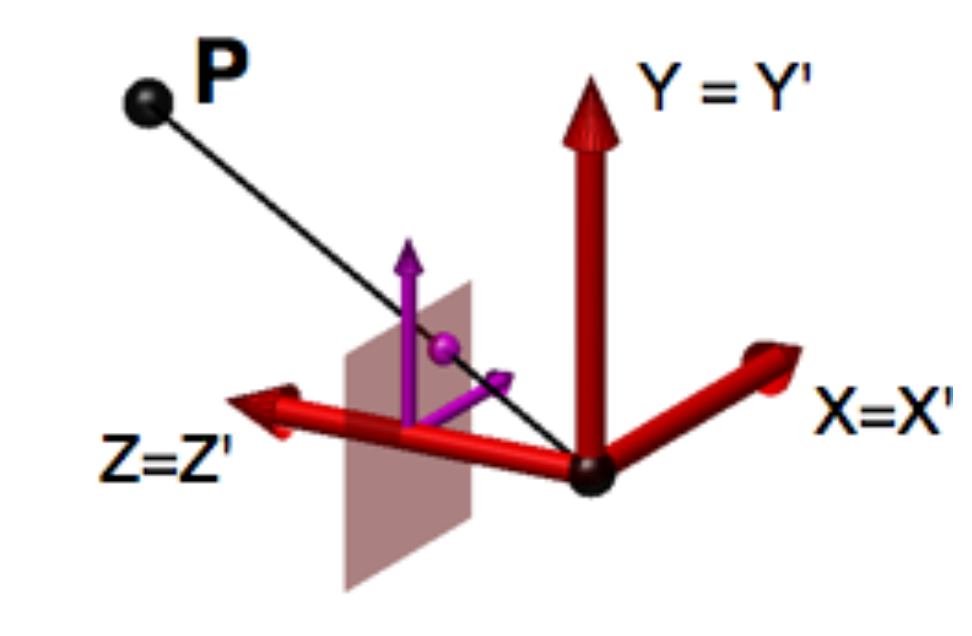
第二步:旋转座标系第一步后的新座标系到摄像机座标座标系,旋转矩阵 $R$ ,关于座标旋转参见旋转矩阵,完成旋转后得到了摄像机座标系下的座标 $O_c$
相机座标转化到像平面座标
先看一下小孔成像模型,使用虚拟像平面可以把座标转换简化。
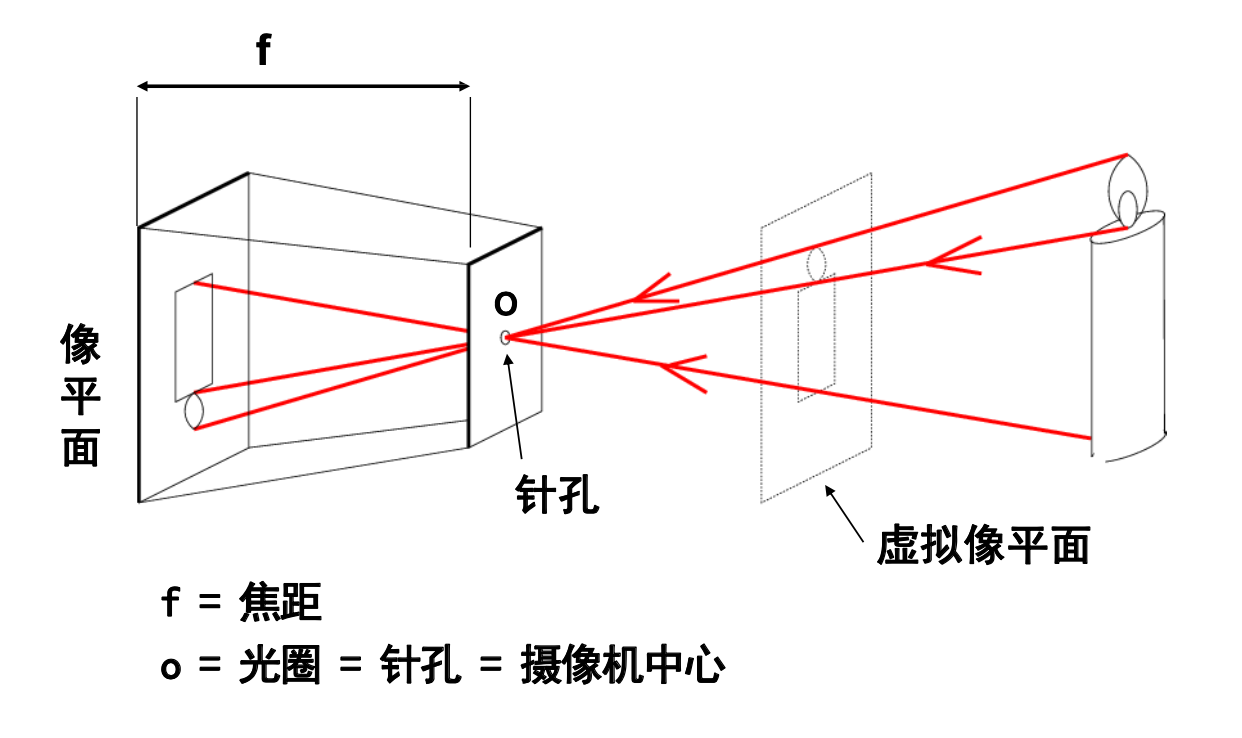
简化后的模型如下图:
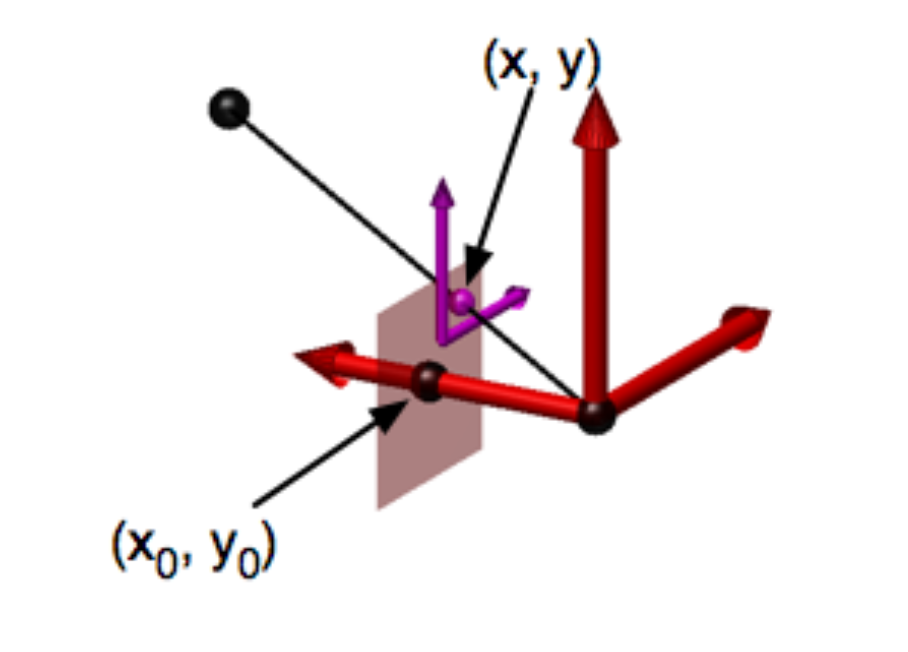
摄像机座标系与虚拟像平面交于点 $(x_o, y_o)$,摄像机座标系下的点 $O_c$ 在虚拟像平面上的投影点是 $(x’, y’)$
通过相似三角形可以容易得到:$ x’ \over X_c $ = $ y’ \over Y_c $ = $ f \over Z_c $,也就是:
$$ x‘ = f \frac {X_c} {Z_c} $$ $$ y’ = f \frac {Y_c} {Z_c} $$ $$ z‘ = f \frac {Z_c} {Z_c} $$
在摄像机虚拟像平面座标系下(左上角为原点,像素为单位),摄像机座标系与虚拟像平面的交点像素座标为 $(x_o, y_o)$,摄像机座标系下的点 $O_c$ 在虚拟像平面上投影点像素级座标是 $(x, y)$,摄像机 CCD 的像素点在 x 和 y 轴方向上的排列密度为 $\sigma_x$ (单位:pixels/meter)和 $\sigma_y$ (单位:pixels/meter),那么:
中间式子可以写成下面形式:
通过逆矩阵运算得到:
再把第一个矩阵拆成下面的形式:
再做矩阵逆运算得到:
摄像机数学模型
现在已经有了一个摄像机的数学模型:
第一步:把观察目标从世界坐标旋转到摄像机坐标
第二步:把摄像机坐标转换到摄像机虚拟像平面像素坐标
实现一个摄像机模型
第一步:世界坐标系到相机坐标系转换
根据摄像机旋转角度计算出旋转矩阵 R:
def rotate(self, roll, pitch, yaw):
'''
Rotate camera by roll, pitch, yaw
'''
rx, _ = cv2.Rodrigues((pitch, 0, 0))
Rodrigues(src, dst=None, jacobian=None, /) -> dst, jacobian
被观测物体的世界坐标转换到相机坐标:
def trans_to_cam(self, v):
'''
Transform the world coordinate vertices to camera coordinate vertices
v: vertices in world coordinate frame
'''
vc = np.dot(self.R, (v.T - np.array([[self._x], [self._y], [self._z]])))
return vc.T
第二步:把相机坐标投影到相机虚拟像平面上
定义相机内参:包括焦距、CCD像素密度参数,写出相机内参矩阵
# camera focus length in meter
self._f = 1
# scale factor: pixels/meter
self._s = 800
# camera intrinsic matrix
self.intrinsic = np.array([[self._f*self._s, 0, self._canvas_width/2.0],
[0, self._f*self._s, self._canvas_height/2.0],
[0, 0, 1]])
进行投影转换计算。注:由于程序实现时世界/相机坐标系采用的是右手Z轴向前的形式,因此计算结果多了一步转换的运算。
def project(self, v):
'''
Project the vertices of camera coordinate to camera image plane coordinate
v: vertices in camera coordinate frame
u = width - f*(Y/X)
v = height - f*(Z/X)
'''
Z = np.expand_dims(v[:, -1], axis=1)
proj_v = np.dot(self.intrinsic, v.T) / Z
proj_v = proj_v.T
proj_v[:, 0:2] = [self._canvas_width, self._canvas_height] - proj_v[:, 0:2]
return proj_v[:, :2]
Demo:
